hannes.winkler@hs-esslingen.de
Esslingen University, Esslingen am Neckar, Germany
Esslingen University, Esslingen am Neckar, Germany
Goal: Digitalization is a maior trend in intralogistics, both for academia and for the industry. This paper gives an overview on current intralogistic trends, the critical success factors of digitalization projects in intralogistics and the results of an online survey regarding these trends and success factors.
Design / Methodology / Approach: Literature reviews for both intralogistic trends and the success factors of the implementation were validated using an online survey with 105 intralogistic professionals, both from academia and industry. Results: Both trends and success factors could be validated and brought into a ranking regarding their importance.
Limitations of the investigation: The online survey had a limited number of respondends and, even though all trends were provided with a short explanation, different interpretations or understandings of trends and success factors might have been present. Moreover, some trends and success factors have a certain overlap and the differences are not always clear.
Practical implications: The survey and the description of intralogistic trends and success factors allow practitioners to better understand, structure and prioritize their implementation projects and possibly to increase their success rate.
Originality / Value: There are several studies on general logistic trends and a few studies regarding success factors for digitalization, mostly in the field of ERP implementation. The presented research and online survey are a contribution to the specific field of trends and success factors in digitalization of intralogistics.
Keywords: Intralogistics; Digitalization; Trends; Critical Success Factors; Survey.
Digitalization is a maior trend in intralogistics, both for academia and for the industry (BVL, 2017). Critical success factors determine the outcome of digitalization projects. The following introduction gives a short description of the topics intralogistics, digitalization in intralogistics and critical success factors.
Intralogistics, often also referred to as in-house logistics, as an element of logistics has been defined in German by the Mechanical Engineering Industry Association in 2005 as “_die Organisation, Steuerung, Durchführung und Optimierung des innerbetrieblichen Materialflusses, der Informationsströme sowie des Warenumschlags in Industrie, Handel und öffentlichen Einrichtungen“ which translates to “the organization, control, implementation and optimization of in-house material flow, flow of information and goods handling in industry, commerce and public institutions_” (VDMA, 2018). Intralogistics comprises the efficient and effective management of warehousing, material handling, and conveying technology and software, including the management of sensors and actuators, identification systems, as well as the planning and implementing of logistic infrastructure and processes (Intralogistik-Netzwerk in Baden-Württemberg e.V., 2018). Intralogistics highly relies on systems such as the enterprise resource planning (ERP) and warehouse management systems (WMS) to administer and manage the data collected for and during intralogistics processes, thereby enabling their users to fulfil the defined logistical requirements (Pfohl, 2018).
Unruh and Kiron (2017) define digitalization as developing “new business models and business processes”, whereas digitization is simply the “initial conversion of products and services into a digital format”. Applying the topic of digitalization to logistics, Stölzle and Burkhardt (2016) propose that the digitalization of logistics in a company involves four aspects: people, logistical objects, logistical processes, and logistics facilities. These aspects are all connected and codependent, since, as an example, the people working in logistical processes must adapt to changes in said processes and the processes must be digitalized in a way the people can still work with them.
Digitalization is currently one of the biggest intralogistic challenges for the industry. Rohleder (2017) carried out a survey on the current situation of implementing digitalization in logistics sector among different German companies. It indicates that, 74% of the respondents consider digitalization as the biggest current logistics challenge for their company and 84% of the targeted companies have already implemented digital solutions in logistics processes to a certain extent.
As many companies are currently implementing digitilization projects, it is crucial to evaluate which critical success factors determine if a project is successful or not. A critical success factor is a critical factor or an activity with the aim of guiding a company or an organization to success. Boynton and Zmud (1984) define critical success factors (CSFs) as „those few things that must go well to ensure success for a manager or an organization and, therefore, they represent those managerial or enterprise areas that must be given special and continual attention to bring about high performance. CSFs include issues vital to an organization's current operating activities and to its future success.”
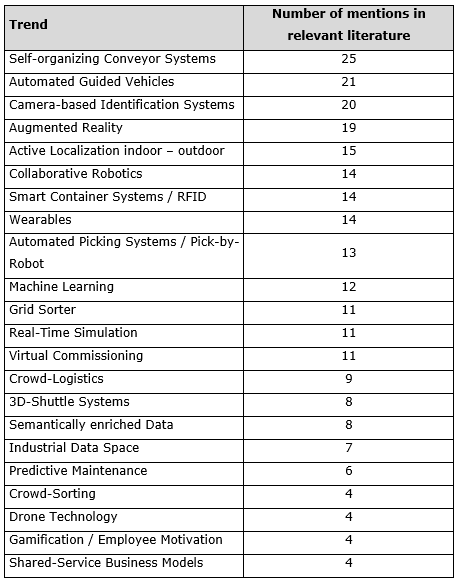
In 2018 Lakner and Winkler conducted a literature review regarding current digital trends in intralogistics. Forty-eight trend studies and publications were scanned. The following table shows the results of this research sorted by number of mentions:
Figure 1. Identified Intralogistic trends
Source: Lakner and Winkler, 2018
These results were compared by the authors with the trends in the so called “Intralogistics Radar”, a framework developed by a group of researchers and scientists from a German industry and academia (Intralogistik-Radar.de). After discussion with the “Intralogistics Radar” group, some additional trends were included in the list of trends from Lakner and Winkler, to complete the online survey. The following trends were included: “Big Data”, “Cloud Technology”, “Highspeed Conveyor Systems”, “Self Organizing Storage Systems” as well as “Passive Localization indoor/outdoor”. The trend “Automated Picking Systems / Pick-by-Robot” was divided into two separate trends “Automated Picking Systems” and “Pick-by-Robot”.
The following chapter gives a short description of each intralogistic trend presented in the online survey in alphabetic order.
3D-Shuttle Systems
3D-shuttle systems are storage and retrieval systems where a three-dimensional shuttle system can operate in three directions / three degrees of freedom. These systems consist of individually independent shuttles in a warehouse, which offers access to all stored goods at all times. In the light of their movement in x-, y- and z-direction, these systems are also called full-roaming systems. Consequently, a 3D-shuttle system is easily adaptable and scalable in regard to the storage needs. In virtue of the flexibility, one shuttle can fill in if another shuttle suffers a failure or breakdown (Kaulfuhs-Berger, 2017; Plohr, 2015).
Active Localization indoor/outdoor
Active localization means that the logistical object (for example the AGV or the container) plays an active role in the localization process, for example by emitting radar, ultrasound or RFID signals or by using cameras to identify its surroundings. Active Localization can be used for the localization of production materials, containers or vehicles. The use of active localization vehicles can actively lead their way to a warehouse and seek, for example, the fastest way, the lowest energy consumption or the ideal velocity (Sedlmayr et al., 2009).
Augmented Reality
Augmented Reality (AR) is the computer-aided enhancement of the human perception of reality. Its most common usage in logistics is the application of data glasses for the “pick by vision” technique. The collaboration of the user and the augmented reality system is characterized by providing the user with the right virtual information at the right place and time, e.g. work instructions or directions to the right picking position. A tracking system records the exact position of the user in the warehouse and provides the user with additional virtual information created through a scene generator and visualized through a visualization medium such as data glasses (Jost et al., 2017; Günthner et al., 2008). The AR display principle follows a four-step approach:
Capturing the scene in real-time;
Scene recognition while characteristic pointers are put in the scene;
Scene procession on the basis of the prior step, 3D (three-dimensional) objects, pictures, videos, etc. are converted and presented;
Scene display with added objects on a monitor, projector, tablet, etc. (Hořejší, 2015).
Automated Guided Vehicles (AGVs)
AGVs can be described as autonomously operating conveyor vehicles. The concept of self-guidance divides the planning issues of a complex system into single decisions and relocates these onto the logistical objects themselves. Hence, the AGV operates autonomously and makes its decisions based on current real-time data. Additionally, an AGV can request data from other AGVs, process them in real-time, and factor these data into its decisions. In the background, a master controller system manages the tasks of integrating the AGV into its surroundings, offering service and operating options to the user and distributes the tasks to each AGV. A tremendous advantage of the use of AGVs is the fact that the individual AGV continues its course unaffected by the potential failure of another AGV. The AGV navigates either track-bound, semi track-free or completely track-free, but independently in all cases (Ullrich, 2014; Rohrhofer and Graf, 2013).
Automated Picking Systems
Automated Picking or retrieval systems follow the goods-to man approach. They rely on sliders, roller conveyors, and diverters to provide the movement of logistical goods. They can operate independently or integrated into a warehouse system of multiple solutions like an automated small parts storage. Automated picking systems offer great picking performance, round the clock availability, and a minimal error rate (ten Hompel and Schmidt, 2003; Martini et al., 2013; Schmidt, 2019).
Big Data
The term “Big Data” refers to data that exceeds the normal degree of the so-called 3V: volume, variety, and velocity of data. In production and logistics these data are mostly generated by sensors, sometimes in intervals of milliseconds, and must be compressed and condensed in a timely manner to extract relevant information. This process is called complex event processing and deals, for example, with calculating sums, minima, maxima and averages, as well as recognizing outliers and trends without saving individual data. The main benefit of using Big Data in logistics is the optimized use of resources and quality improvements through better data quality. The data collected and analyzed benefit the use of resources by increased transparency and an enhanced resource consumption. Quality improvements are made by enhancing process quality and performance through the analysis of process results (Kückelhaus and Zeiler, 2013; Schöning and Dorchain, 2014; Bichler et al., 2017).
Camera-based Identification Systems
Camera-based identification systems are used for identifying logistical objects and range from simple barcode reading to sophisticated image recognition. A camera-based identification consists of a camera chip and objective, light sources, such as light emitting diodes (LED), and their interface for electronic control, and evaluation systems to uniquely identify objects by their primary identification attributes. These attributes can either be plain text, 1D- or 2D-barcodes or they can have a more advanced image recognition system, in which the surface or the dimensions of a component may uniquely identify the part. The system can either be implemented in a mobile hand-held terminal or as a permanent installation. With the help of these systems, entire components or modules can be mapped in an ERP-system in real-time (Hippenmeyer and Moosmann, 2016). Usage cases for camera-based identification systems are:
Cloud Technology
The cloud is a web-based data storage that allows multiple clients to access saved data at once. The joint usage distributes the data volume over multiple servers, thereby relieving the users’ hard drives. Closely related is the topic of Cloud Computing, which refers to the saving and altering of standardized information technology (IT) applications on the cloud. This shifts the execution of programs and IT processes from intra-company servers to one or multiple external servers as a service provided by another organization. By using the cloud, the use of resources in a company can be optimized and aligned with its core competences. A cloud solution offers scalability as data space is easily available for purchase compared to the expansion of a company-owned server. In supplying data storage as a service, the functionality and performance can be improved. It is to be noted that Cloud Computing bears the risk of cyber-attacks from unauthorized access points and industrial espionage, against which the cloud needs to be protected to ensure the correct processing of data and its credibility (Schöning and Dorchain, 2014; Bichler et al., 2017; Liu and Xu, 2017).
Collaborative Robotics
Collaborative robotics describes the interaction of humans and robots without the robot being encapsulated in a robot cell surrounded by a protective fence. Humans and robots work collaboratively in a mutual work zone while distributing the work according to the strengths of each contributor: human mobility and adaptability, and robotic constant high quality and precision. This approach helps to ease the burden on workers, reducing the risk of injuries and strains from manual labor and, consequently, reducing social and economic costs for manufacturers. Special attention must be paid to the parts of the interaction where unexpected events or failures occur, and the robot is forced to act differently from its initial purpose. Still, robots are becoming more and more regarded as “collaborating partners instead of – potentially hazardous – tools” (Wang et al., 2017). This moves the role of the robots from simple assisting tasks to a feasible solution for more complex and interactive collaboration (Haag, 2015; Wienrich et al., 2016; Wang et al., 2017).
Crowd Logistics
Crowd procedures stand on the notion that people have resources that can be actuated to execute conventional business actions through IT platforms. These resources can be of financial, intellectual or material nature. Crowd logistics refers to the shift of transport or other logistic activities to a crowd of private individuals, cars, drones, autonomous vehicles, etc., and the control of these activities by a technical system, such as a web-based platform, or a mobile application. In practice, it thereby poses a solution to address the challenge of increasing transport into small, downtown areas, for example. Crowd logistics for the so-called “last mile” comprises the transport from a central transfer point to a recipient’s private parcel box by any person en route: families on their way to a vacation, commuters, bicycle riders or simply pedestrians. The crowd can also be used to store materials, not just transport them. This approach proposes a change of the private consumer from a passive party to whom value must be provided to playing an active role in logistics. Risks in crowd logistics include the possible impairment of the shipment security, liability concerns, and general service reliability issues (Ködel and von Danwitz, 2017; Dörrzapf et al., 2017; Carbone et al., 2017).
Drone Technology
Drones are categorized by the European Commission as Remotely Piloted Aircraft Systems (RPAS), with a pilot required to remotely steer the drone at all times. These remote-controlled aviation systems can be subclassified into multi-copters and fixed wing aircrafts. In an indoor manufacturing context, multi-copters are most applied. Multi-copters can facilitate new supply concepts for assembly due to their movement in the airspace above assembly lines and logistical areas. They can guarantee a timely and precisely-timed supply and, integrated with modern image processing, sensors technology and identification technologies, an efficient way of using otherwise unused space. Aside from supplying the manufacturing line with materials, unmanned aerial vehicles can be used for the delivery of urgent spare parts or for inventory management in a warehouse (Wrycza, 2018; Landrock and Baumgärtel, 2018).
Gamification / Employee Motivation
Gamification is the application of the entertainment aspect of video games to improve learning success, motivation and problem-solving abilities among the tasks performed by the staff. It is used in monotone and personnel-intensive tasks such as picking and thereby integrates game-design elements in non-playful environments. Members of the staff can earn virtual awards either in teams or as individual players. In some applications, the game-element of the innovation extends to players choosing an avatar. Gamification and the resulting employee motivation show significant improvements in learning success, customer loyalty, return on investment and data quality (Kapp, 2012; Deterding et al., 2011).
GridSorter
The GridSorter is a modular conveyor and sorting system. It operates subordinate to a decentralized control system used to sort logistical goods in an efficient and space-saving manner. The GridSorter consists of identical, rectangular converter modules that are equipped with actuators, sensors, and a control system. The sensors recognize the position of the load carrier, actuators move said load carrier, and the control system facilitates data and information exchange between neighboring modules. These modules are arranged in a grid rendering the system highly efficient and robust. The modules can easily be replaced in case of a breakdown because of their modularity. Offering a vast field of applications, such as sorting, buffering, sequencing, and transport, the grid sorter is multi-functional and adaptive to different logistical requirements. Another advantage is its automatic disruption detection and the low susceptibility to failure, because alternative transport routes can be chosen automatically, bypassing the single point of failure issue that traditional conveyor and sorting systems have (Fuß et al., 2016; Seibold and Furmans, 2014; Gebhardt Fördertechnik GmbH, 2018).
Highspeed Conveyor Systems
Highspeed Conveyor Systems can be used to quickly transport a variety of different goods, such as raw materials, piece goods, and even pallets over long distances. These systems reduce the need for industrial trucks and reduce the lead-time by decreasing the transport time. A highspeed conveyor belt can move goods with a speed ranging from eight meters per second up to twenty meters per second. Its capacity can be enhanced with an increase in belt width. Important considerations to the use and design of these systems are a decreased flexibility, noise emitted by the conveyor system and energy consumption. Aside from intra company transport of goods, highspeed conveyor systems can also be used for transport to or between nearby facilities (Lodewijks, 1999; Schröppel and Katkow, 2016).
Industrial Data Space
Industrial Data Space is an initiative launched by representatives from business, politics, and research in Germany in 2014. It represents a virtual data space where a data owner can share documents and information with certified business partners that can retrieve and edit said data. The data owner always has the right of decision over them, the so-called digital sovereignty. Key features of the industrial data space are the establishment of a basis of trust between data user and data owner, the integration of an infrastructure enabling the communication between companies, people and interconnected devices and the creation of levels of protection for data interchange. By facilitating an encrypted and automated data storage and data exchange, manual data reconciliation will become (at least partially) obsolete. The data is stored in a decentral infrastructure within a network of trusted data. In case of disagreements, an independent entity can intervene to settle and clear up the disparity. For example, two companies can share and use documents jointly. A third-party cloud entity provides external industrial data space connectors for both companies, which facilitates uploading, downloading, and searching documents on the industrial data space. The industrial data space itself is equipped with a broker whose task is to index, clear, and register data changes on the industrial data space to ensure consistency (Otto et al., 2017, 2018).
Machine Learning
Samuel (1959) defines machine learning as the artificial generation of knowledge from experience. Computers expand and improve their data entry-based skills to serve the three purposes: adaption of the computer to its changing environment, data mining to filter regularities from a big quantity of data or data identification in complex areas such as handwriting or voice recognition (Mitchell, 2010). The recognition of patterns and the optimization of speed and quality resulting in cost reductions are the main benefits of machine learning. Konstantinova (2014) describes that machine learning can be done through three approaches:
Passive Localization indoor/outdoor
In passive localization, the object to be localized does not actively emit signals or waves. The estimation occurs via a reflecting object or radio frequency with an estimation algorithm. It is carried out in a technical system with a transmitter and multiple receivers distributed across the area of interest. The idea of passive localization also feeds off the concept of exploiting reflected signals to enhance the quality of the localization. However, the result can only be estimated if the object itself (different from active localization) does not have a power source to actively communicate its position but simply responds to a localization call. The benefits of this technology are the low complexity of the transmitters and their little to no energy consumption. Passive localization can be used to track, for example, indoor vehicles or containers (Shen et al., 2012; Decarli et al., 2014).
Picking Robots
Picking robots are able to handle goods with a gripper and/or suction systems. As with automated picking systems, they can provide constant high picking performance as well as a minimal error rate. Following the man-to-goods approach, mobile picking robots, such as portal robots, rail-guided picking robots, and autonomous robots move around the warehouse or storage areas to conduct the picking process. The superordinate control system must be to provide security in human-robot interaction. Its sophistication must thus increase with the robot’s autonomy (Martini et al., 2013; ten Hompel and Schmidt, 2003).
Predictive maintenance
There are several approaches and stages of sophistication in machine maintenance: reactive, periodic, proactive, and predictive. Reactive maintenance takes place in the form of fixing the equipment when it is down, periodic maintenance occurs within a specified schedule and proactive maintenance aims to eliminate defects at an early stage. The more advanced and sophisticated approach is predictive maintenance. Predictive maintenance is used to estimate the remaining service life of components in machines through analytics. Sensors on machine components collect mass data, which is processed and compared to fault patterns with the help of stochastic algorithms. Through real-time condition monitoring of the machines, their operating efficiency and process stability is evaluated. This helps to increase the intervals between repairs and to lower the cost of unplanned breakdowns. Correspondingly, predictive maintenance enables the machine user and producer to structure their processes and decisions as well as their policies proactively, intensifying the relationships between manufacturer and customer, possibly enabling new business models. Predictive maintenance is most effective in the early life and the end of life of a machine, as faults occur more frequently in these stages (Mobley, 2002; Rapolu, 2015; Feldmann et al., 2017).
Real-time simulation
When data changes quickly, it makes resulting calculations prone to inaccuracy, the reason for this being the so-called information-time-lag. It occurs when state variables differ from the actual state to the target state, which calls for real-time synchronization and data simulation. The information-time-lag can be reduced or eliminated by automating and accelerating data collection and processing. Real-time simulations result in application security and cost reduction. A typical application in logistics is not only the simulation of material flow, but also the planning of facilities and training of employees. Volkswagen presented the use of real time simulations for training and testing (Gutenschwager et al., 2017; Halang and Unger, 2014; Volkswagen AG, 2017).
Self-organizing conveyor systems
A self-organizing conveyor system operates in a decentral and autonomous way. Each conveying entity is capable of and responsible for its decision-making process. The conveying modules can decide on conveying speed, sorting and rerouting processes, depending on the current performance requierements and the actual transportation and sorting capacity. The conveying entities communicate with each other and transmit their current load and performance to continuously factor into their individual decision-making processes. On the route through the self-organizing conveyor system, the location of each logistical good is determined, their routes are planned self-sufficiently, and the good is steered to their place of demand (ten Hompel, 2006; Liekenbrock, 2005).
Self-organizing storage systems
A self-organizing storage system operates in a decentral and autonomous way. Each storage entity is capable of and responsible for its decision-making process. Coupled with a self-optimizing approach, a self-organizing storage system autonomously decides on optimal storage locations, putaway and picking sequences, depending on the current performance requierements and the actual transportation and storage capacity. The storage entities communicate with each other and transmit their current load and destinations to continuously factor into their individual decision-making processes. The self-organizing system can, for example, during phases of low demand, consolidate goods from different locations into one single location to optimize warehouse space. Communication can also be extended to other independent entities outside the system, such as containers, machines or other equipment. The modular approach of a self-organizing warehouse proves to be easily scalable and makes the elements of the storage system easily interchangeable in case of a breakdown.
Semantically enriched data
Semantics as a part of linguistics deals with the meaning of words, focusing on analyzing the combination of simple expressions to derive meaning from complex expressions. Semantic enrichment is often referred to as semantic tagging, fingerprinting or indexing and adds a layer of meaning to a subject, so computers can make sense of it. This requires the content creator to markup his data so that computers can act on distinct bits of data as opposed to a whole subject. Applied to digitalization in manufacturing and logistics, the approach is used to simplify and expedite the installation, operation and maintenance of machines or equipments. In view of these goals, metadata is allocated to data to make a computer or machine process and understand the meaning behind a piece of information, making semantically enriched data also applicable in machine-to-machine communication (Naumann et al., 2014; Fay et al., 2017).
Shared service business models
Shared service business models refer to the concentration of services in a joint organizational area of responsibility. The so-called shared service centers comprise internal, formerly locally executed tasks. With the goal of efficient usage of resources in mind, multiple business units make use of these now centrally administered tasks. This medium-term or long-term consolidation of services can lead to one or multiple economically and legally independent areas of responsibility. The customers of the shared service center can be multiple organizational units in a company, as well as external organizations. Shared services are process and customer-oriented units, which operate with the goal of eliminating inefficient procedures and flattening areas of hierarchy. This results in an optimal usage of capacities and a reduction of redundancy. The shared services approach differs from outsourcing in the roles of each participant: while outsourcing is done with an external service provider, a shared service center is operated as part of the company. In logistics, shared service centers can, for example, be used for lending and offering space and objects such as operating materials or industrial trucks (Brühl, 2015; Keuper, 2013).
Smart Container Systems / RFID
Smart container systems aspire to provide a detail-oriented replication of the movement of logistical objects throughout a company. Consequently, they aid in the control and monitoring of the movement of pallets and containers. Moreover, a smart container system, equipped with sensor technology, can supply WMS or ERP systems with discrepancies from target states, information about the container’s current weight, and its surroundings. Other information concerns the goods transported, such as their batch number or expiration date. These reusable systems fulfill these tasks by being equipped with RFID technology and, in the case of additional sensors, with a self-sufficient power supply (Lang and Laur, 2006; Teßmann et al., 2017).
Virtual Commissioning
Virtual Commissioning is a tool to virtually ensure plant behavior using digital as well as real resource and product data prior to the actual execution and set-up. Machines, warehouses and production sites can be planned, built, tested and operated in a virtual environment. These tests include the hydraulic, pneumatic, electric, and mechanic parts of a system and helps in uncovering and thus preventing mistakes in planning and setup as well as reducing the allover setup time (Bergert et al., 2018; Schenk, 2015).
Wearables
Wearables are tools for human-computer interaction that are worn by employees and support them, either physically (for example in the form of an exoskeleton) or supply them with information. The most common tasks in the area of wearables are tracking, augmentation, monitoring, and communication. In logistics, frequently used wearables include data glasses, smart watches, tablets, smart phones, exoskeletons, and technology integrated into clothing. To facilitate a smooth workflow, wearables must offer a way to interact with the employee, have a constant source of power, be connected to information systems, and use sensors to register the surroundings. Data collection through wearables is controversial in the aspect of employee monitoring, but contributes to the reduction of fatiguing work, errors or unnecessary movements. Due to the analysis of the employee’s work, differences in work methods and steps can be uncovered and used in the training of new employees. The virtual training of employees proves to be superior to verbal or written training due to the immediate feedback and the possibility of getting accustomed to the work environment (Seyrkammer, 2015; Mann, 1998).
Zhang and Winkler (2018) conducted a literature review regarding critical success factors for the implementation of digitalization projects in intralogistics. As the number of publications focused on intralogistics was limited, the research was extended to other digitalization projects such as the ERP implementation. More than 370 articles were screened and a total of 383 critical success factors listed. By joining similar success factors, grouping them and bringing them into a hierarchical model, the following chart with critical success factors or digitalization projects could be derived (Zhang and Winkler 2018):
Figure 2. Identified critical success factors
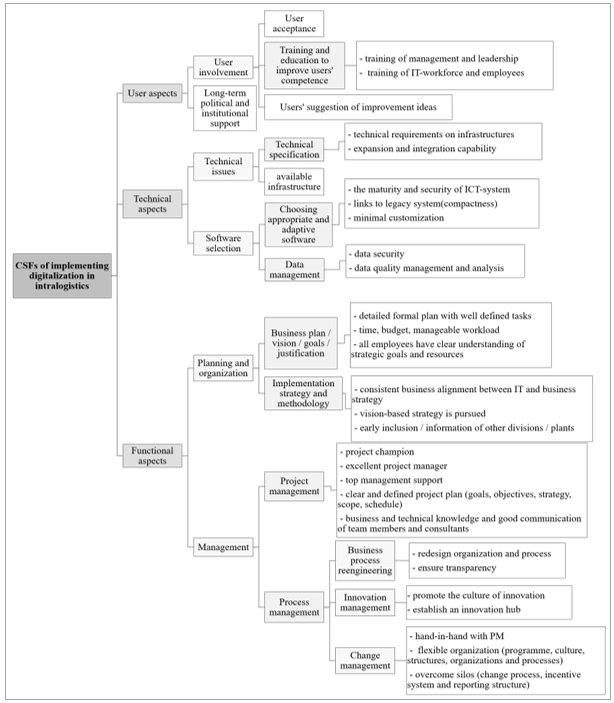
Dource: Zhang and Winkler, 2018
From November 2018 to March 2019 the authors conducted an online survey to validate both the trends in intralogistics raised by Lakner and Winkler and the success factors raised by Zhang and Winkler. The online survey was answered by a total of 105 respondends. 42% of the participants classified themselfes as research institutes, education or universities, 38% as users of intralogistics hardware and software and 20% as manufacturers or service providers of intralogistics hardware and software solutions. 70% of the respondends were from Germany, 21% from Brazil, and 9% from other countries.
In the first open question, the respondends were asked to complete the following sentence: “The success of digitalization projects in Intralogistics will especially depend on…”. The objective of this open question was to collect answers before forcing the respondend into a multiple choice dialog. The most common answers were: the success will depend on “good processes - it does not make sense to digitalize bad processes”, “fast and safe transfer and processing of data”, “clear business case / profitability”, “if you can turn data into money”, “few and accessible standards”, “tapping into the creative ressources of the employees”, “attitude of the management to seize the opportunity of digitalization”, “if companies will get their master and transaction data straight” or “the acceptance of the employees”.
In the following part of the survey the respondends were asked to choose from the list of trends. Multiple answers were possible. The following table shows the percentage of respondents stating they “would invest in this trend / technology”:
Figure 3. Trends considered worth investing
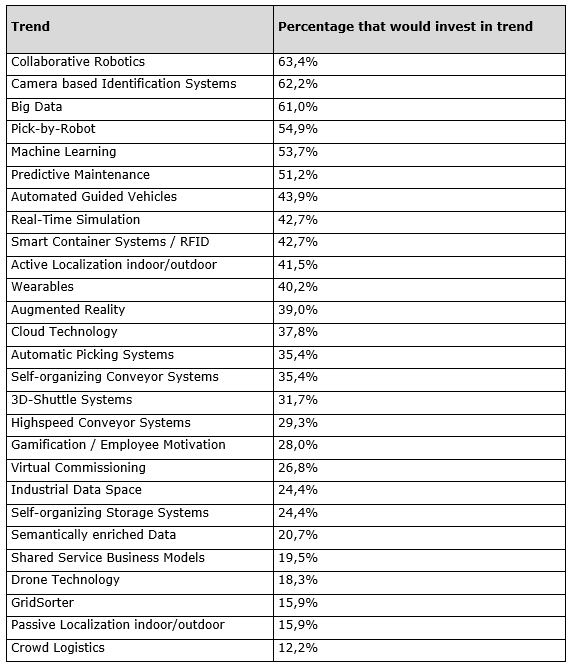
Source: the authors themselves
In the next question the respondends were asked if any relevant trends were missing in the list, according to their point of view. Most respondends found the list comprehensive. The following few trends were mentioned as missing: “3D modelling combined with simulations and online / realtime sensors connected in order to design the digital twin of complex projects”, “Digital twin”, “Distributed ledger / blockchain”, “intelligent and low cost sensors”, “model based planning and realization of logistic infrastructure”, “QR code”, “rope / cable robotics”, “3D logistics planning”, “5G mobile networks”, “standardized and modular intralogistic components”, “RFID/Apps/ERP/WMS (as many companies do not use this yet).
In the following field of the survey, the respondends were asked to rank the critical success factors for the implementation of digitalization projects in intralogistics from their point of view. All success factors had to be ranked as either “less relevant”, “relevant” or “very relevant”. The following table shows the percentage of respondents, considering the success factor as “relevant” or “very relevant”:
Figure 4. Success factors considered relevant
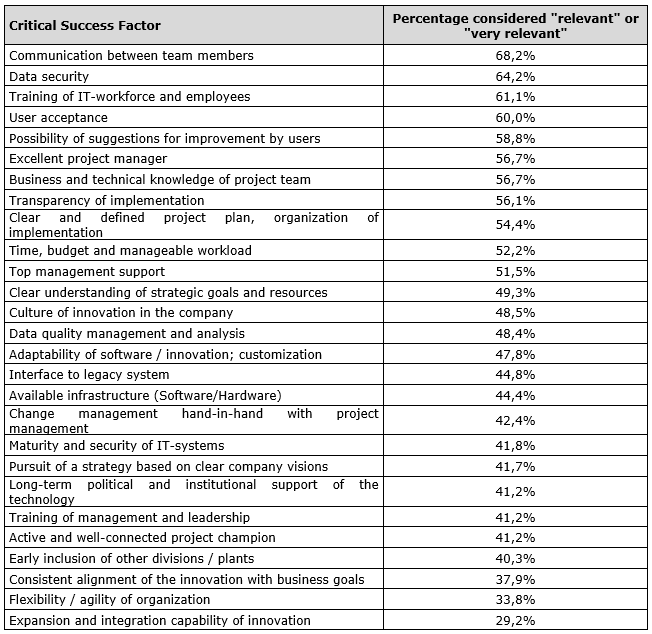
Source: the authors themselves
The respondends were asked if they would add any additional success factor regarding digitalization projects in intralogistics. As additional success factors were mentioned “bias for action”, “optimize process before digitilizing it”, “commitment and courage of the management”, “developing an innovation and change culture”, “higher investment in the early project stages (planning, modelling, simulating) to reduce risks and to improve the quality of the implementation project”, “engaging the whole company and understanding the courses of action”, “employee adaptability”, “unconventional thinking - long term view and action in collaboration with network partners” and “improvement culture”.
The digitalization trends are major challenges for intralogistics in the industry. In this paper several trends could be described, validated and ranked according to their potential. Also, critical success factors to determine the success of digitalization projects could be validated. Several additional trends and success factors were stated; however, most of the 105 respondends considered the list of trends and success factors as comprehensive.
It is still a challenge to define and group both trends and success factors in intralogistics, as the difference between each trend and success factor is not always clear. Also often one trend is strongly linked to another, as in the case of “image recognition” often in combination with “machine learning”, “big data” combined with “cloud technology”, “AGV” together with “active indoor navigation” or “predictive maintenance” with “big data”. Moreover, the success factors are strongly interlinked, as an “excellent project manager” will ensure a “good communication between team members” and so on.
Future research could focus on the interdependencies and mutual influences of both trends and success factors. Future research could also investigate how critical success factors could be measured and evaluated to define project requirements before starting a specific digitalization project. As a long term research goal an “early warning system” for digitalization projects could be developed, to alert a company in an early project stage, when specific critical success factors are disregarded in a digitalization project.
Bergert, M. et al. (2018), Report Einsatz der Virtuellen Inbetriebnahme im automobilen Karosserierohbau – Ein Erfahrungsbericht.
Bichler, K. et al. (2017), Kompakt-Lexikon Logistik. 2.250 Begriffe nachschlagen, verstehen, anwenden. 3., aktualisierte Auflage. Wiesbaden: Springer Gabler.
Boynton, A. C. and Zmud, R. W. (1984), “An Assessment of Critical Success Factors“, Sloan Management Review, Vol. 25, No. 4, pp. 17-27.
Brühl, V. (2015), Wirtschaft des 21, Jahrhunderts, Herausforderungen in der Hightech-Ökonomie, Springer Fachmedien Wiesbaden, Wiesbaden.
Bundesvereinigung Logistik - BVL (2017), Trends and Strategies in Logistics and Supply Chain Management, Digital Transformation Opportunities, available at https://logistiktrends.bvl.de/en (access Jun 10, 2019)
Carbone, V. et al. (2017), “The Rise of Crowd Logistics: A New Way to Co-Create Logistics Value”, Journal of Business Logistics, Vol. 38, No. 4, pp. 238–252.
Decarli, N. et al. (2014), “A Novel Joint RFID and Radar Sensor Network for Passive Localization: Design and Performance Bounds”, In IEEE Journal of Selected Topics in Signal Processing, Vol. 8, No. 1, pp. 80–95.
Deterding, S. et al. (2011), Gamification: Toward a definition, Proceedings of the 2011 Annual Conference Extended Abstracts on Human Factors in Computing Systems. ACM, New York, 2011.
Dörrzapf, L. et al. (2017), “Die Crowd-Community als Lieferant der letzten Meile?, In: REAL CORP 2017 - PANTA RHEI - A World in Constant Motion. Proceedings of 22nd International Conference on Urban Planning, Regional Development and Information Society. pp. 147-154.
Fay, A. et al. (2017), “Semantische Inhalte für Industrie 4.0“, atp Magazin, Vol. 59, No. 07-08, pp. 34.
Feldmann, S. et al. (2017), Predictive Maintenance: Service der Zukunft – und wo er wirklich steht, Roland Berger GMBH.
Wrycza, P. (2018), Drohnentechnik, Fraunhofer IML, available at: https://www.iml.fraunhofer.de/de/abteilungen/b1/verpackungs_und_handelslogistik/autoid/DL_AutoID/dl_aid_drohnentechnik.html (access Jun 10, 2019)
Fuß, B. et al. (2016), Bestimmung der Leistungsverfügbarkeit eines modularen Sorters.
Gebhardt Fördertechnik GmbH (2018), GridSorter - Dezentraler Plug&Play Sorter & Sequenzer, available at: https://www.gebhardt-foerdertechnik.de/de/produkte/sortiertechnik/gridsorter/ (access Jun 10, 2019)
Günthner, W. A. et al. (2008), Technologie für die Logistik des 21. Jahrhunderts, In Lehrstuhl für Fördertechnik Materialfluß Logistik – Publikationen, available at: http://www.fml.mw.tum.de/fml/images/Publikationen/Technologie_fuer_die_Logistik_des_21_%20Jahrhunderts.pdf (access Jun 10, 2019)
Gutenschwager, K. et al. (2017), Simulation in Produktion und Logistik, Grundlagen und Anwendungen, Berlin, Springer Vieweg.
Haag, M. (2015), Kollaboratives Arbeiten mit Robotern – Vision und realistische Perspektive. In: Botthof, A. and Hartmann, E. A. (Eds.), Zukunft der Arbeit in Industrie 4.0, Springer Berlin Heidelberg, Berlin, Heidelberg, pp. 59–64.
Halang, W. A. and Unger, H. (2014), Industrie 4.0 und Echtzeit, Echtzeit 2014, Springer Vieweg (Informatik aktuell), Berlin.
Hippenmeyer, H. and Moosmann, T (2016), Automatische Identifikation für Industrie 4.0., Springer Berlin Heidelberg, Berlin, Heidelberg.
Hořejší, P. (2015), Augmented Reality System for Virtual Training of Parts Assembly, In: Procedia Engineering 100, pp. 699–706.
Intralogistik-Netzwerk in Baden-Württemberg e.V. (2018), Das ist Intralogistik, Stuttgart, available at: https://www.intralogistik-bw.de/die-branche/das-ist-intralogistik/ (access Jun 10, 2019)
Jost, J. et al. (2017), “Der Mensch in der Industrie – Innovative Unterstützung durch Augmented Reality“, In: Vogel-Heuser, B. et al. (Eds.), Handbuch Industrie 4.0 Bd.1, Vol. 21, Springer Berlin Heidelberg, Berlin, Heidelberg, pp. 153–174.
Kapp, K. M. (2012), The gamification of learning and instruction. Game-based methods and strategies for training and education. San Francisco, Calif.: Pfeiffer (Essential resources for training and HR professionals).
Kaulfuhs-Berger, J. (2017), “Shuttle-Systeme mit dritter Dimension. Distributionszentren werden zu Fulfillment-Maschinen”, In: Hebezeuge Fördermittel 9/2017.
Keuper, F. (Ed.) (2013): Corporate Shared Services. Bereitstellung von Dienstleistungen im Konzern. 2., überarb. und erw. Aufl. Wiesbaden: Gabler.
Ködel, A. and von Danwitz, S. (2017), Crowd-Logistik - Eine Potenzialanalyse für den deutschen KEP-Markt, Universität zu Köln, Köln, available at: http://docplayer.org/70114297-Crowd-logistik-eine-potenzialanalyse-fuer-den-deutschen-kep-markt.html (access Jun 10, 2019)
Konstantinova, N. (2014), Machine learning explained in simple words, Wolverhampton, available at: http://nkonst.com/machine-learning-explained-simple-words/ (access Jun 10, 2019)
Kückelhaus, M. and Zeiler, K. (2013), Big Data in Logistics: a DHL perspective on how to move beyond the hype, Troisdorf.
Lakner, P. and Winkler, H. (2018), Erfolgsfaktoren der Digitalisierung in Logistikprojekten, Thesis Faculty Wirtschaftsingenieurwesen, Esslingen University.
Landrock, H. and Baumgärtel, A. (2018), Die Industriedrohne - der fliegende Roboter, Professionelle Drohnen und ihre Anwendung in der Industrie 4.0, Springer Vieweg, Wiesbaden.
Lang, W. and Laur, R. (2006), Der Intelligente Container. Anwendung von RFID und Sensortechnologie für autonome Transportüberwachung. selbststeuernde logistische Prozesse - ein Paradigmenwechsel und seine Grenzen. Bremen.
Liekenbrock, D. (2005), Simulative study of the decentralized control of complex conveyor networks.
Liu, Y. and Xu, X. (2017), “Industry 4.0 and Cloud Manufacturing: A Comparative Analysis”, Jornal of Manufacturing Science and Engineering, Vol. 139, No. 3, pp. 34701.
Lodewijks, G. (1999), The design of high speed belt conveyors, available from: http://www.saimh.co.za/beltcon/beltcon10/paper104.html (access Jun 10, 2019)
Logivations GmbH (2019), Kamerabasierte Objekterkennung, Deep Machine Learning in Verbindung mit Computer Vision, Version 2.7, München, available at: https://www.logivations.com/de/land/pdf/KameraBasierte_Objekterkennung.pdf (access Jun 10, 2019)
Mann, S. (1998), Wearable computing as a means for personal empowerment. In Proceeding of the 3rd International Conference on Wearable Computing (ICWC), pp. 51-59.
Martini, A. et al. (2013), Automatische Kommissionierung: Neue Lösungen für ein altes Problem. In Logistik für Unternehmen.
Mitchell, T. M. (2010), Machine learning, McGraw-Hill Science, New York, NY.
Mobley, R. K. (2002), An introduction to predictive maintenance, 2 ed., Butterworth-Heinemann (Plant Engineering), Amsterdam.
Naumann, M. et al. (2014), “Mensch-Maschine-Interaktion”, In Bauernhansl T. et al. (Eds.), Industrie 4.0 in Produktion, Automatisierung und Logistik, Morgan Kaufmann, pp. 509–523.
Otto, B. et al. (2018), “Industrial Data Space”, In Neugebauer, R. (Ed.), Digitalisierung - Schlüsseltechnologien für Wirtschaft und Gesellschaft, Vol. 51. 1. Auflage., Springer Vieweg, Berlin, Heidelberg, pp. 113–133.
Otto, B. et al. (2017), Reference Architecture Model for the Industrial Data Space, Fraunhofer-Gesellschaft, München, available at: http://publica.fraunhofer.de/eprints/urn_nbn_de_0011-n-4813892.pdf (access Jun 10, 2019)
Pfohl, H. (2018), Logistiksysteme, Betriebswirtschaftliche Grundlagen, 9 aufl., Springer Berlin Heidelberg, Berlin, Heidelberg.
Plohr, C. (2015), State of the Art der Handelslogistik - Betrachtung und Analyse aktueller Konzepte und Technologien, Bericht, Report, Universität Bremen: Wirtschaftswissenschaften.
Rapolu, B. (2015), “Predictive Maintenance: big data on rails”, in Dataconomy, available at: https://dataconomy.com/2015/04/predictive-maintenance-big-data-on-rails/ (access Jun 10, 2019)
Rohleder, B. (2017), Digitalisierung der Logistik, Bitkom-Hauptgeschäftsführer.
Rohrhofer, C. and Graf, H. (2013), Weissbuch der Intralogistik und Logistiktechnologie, Systemüberblick, Implementierung, Optimierung, Shaker, Aachen.
Samuel, A. L. (1959), “Some studies in machine learning using the game of Checkers”, IBM Journal of Research and Development, Vol. 3, No. 3, pp. 71–105.
Schenk, M. (Ed.) (2015), Produktion und Logistik mit Zukunft: Digital Engineering and Operation, Springer Vieweg (VDI-Buch), Berlin, Heidelberg.
Schmidt, T. (Ed.) (2019), Innerbetriebliche Logistik, Springer Berlin Heidelberg (Fachwissen Logistik), Berlin, Heidelberg.
Schöning, H. and Dorchain, M. (2014), “Data Mining und Analyse”, In: Bauernhansl et al. (Eds.), Industrie 4.0 in Produktion, Automatisierung und Logistik: Anwendung, ·Technologien, Migration, Springer Fachmedien Wiesbaden, Wiesbaden, pp. 543–554.
Schröppel, M. and Katkow, A. (2016), “Neuartiges Hochgeschwindigkeitsfördersystem für Palettentransport”, In Logistics Journal: Proceedings, Vol. 2016, available at: https://www.logistics-journal.de/proceedings/2016/fachkolloquium2015/4351/katkow_16_15.pdf (access Jun 10, 2019)
Sedlmayr, M. et al. (2009), “Towards a Smart Object Network for Clinical Services”, In AMIA Annual Symposium Proceedings 2009, pp. 578–582.
Seibold, Z. and Furmans, K. (2014), GridSorter – Logische Zeit in dezentral gesteuerten Materialflusssystemen, In Logistics Journal: Proceedings, Vol. 2014, available at: https://www.logistics-journal.de/proceedings/2014/4060/seibold_2014wgtl.pdf (access Jun 10, 2019)
Seyrkammer, S. (2015), Wearable computing technology, Potenzielle Einsatzmöglichkeiten in der Industrie, Diplomica Verlag GmbH, Hamburg.
Shen, J. et al. (2012), Accurate Passive Location Estimation Using TOA Measurements, In IEEE Transactions on Wireless Communications, Vol. 11, No. 6, pp. 2182–2192.
Stölzle, W. and Burkhardt, J. (2016), Thesen zu Logistik 4.0, In Gassmann, O. and Sutter, P. (Eds.), Digitale Transformation im Unternehmen gestalten: Geschäftsmodelle Erfolgsfaktoren Fallstudien, Hanser, München, pp. 59–64.
ten Hompel, M. (2006), Das Internet der Dinge. Potenziale autonomer Objekte und selbstorganisierender Systeme in der Intralogistik, In Arnold, D. (Ed.), Intralogistik. Potentiale, Perspektiven, Prognosen, Springer-Verlag GmbH (VDI-Buch), Berlin Heidelberg, pp. 266–276.
ten Hompel, M. and Schmidt, T. (2003), Warehouse Management, Automatisierung und Organisation von Lager- und Kommissioniersystemen, Springer Berlin Heidelberg (VDI-Buch), Berlin, Heidelberg.
Teßmann, R. et al. (2017), “Intelligente Ladungsträger: Funktionsweise und Nutzen für die Lagerlogistik”, In Christoph, G. and Grosse, E. H. (Eds.), Warehousing 4.0. Technische Lösungen und Managementkonzepte für die Lagerlogistik der Zukunft, B+G Wissenschaftsverlag, Lauda-Königshofen, pp. 161–172.
Ullrich, G. (2014), Fahrerlose Transportsysteme: Eine Fibel - mit Praxisanwendungen - zur Technik - für die Planung, 2., überarb. u. erw. Aufl. 2014, Springer Fachmedien Wiesbaden, Wiesbaden.
Unruh, G. and Kiron, D. (2017), Digital Transformation on Purpose, MIT Sloan Management Review, available at: https://sloanreview.mit.edu/article/digital-transformation-on-purpose (access Jun 10, 2019)
VDMA (2018), Was ist eigentlich Intralogistik?, available at: https://foerd.vdma.org/viewer/-/v2article/render/16118581 (access Jun 10, 2019)
Volkswagen AG (2017), Volkswagen Konzern setzt auf Virtual Reality Lösungen für interaktive Zusammenarbeit in Produktion & Logistik, available at: https://www.volkswagenag.com/de/news/2017/07/volkswagen_group_is_backing_virtual_reality_solutions.html# (access Jun 10, 2019)
Wang, X. V. et al. (2017), “Human–robot collaborative assembly in cyber-physical production: Classification framework and implementation”, CIRP Annals, Vol. 66, No. 1, pp. 5–8.
Wienrich, C. et al. (Eds.) (2016), “Trends in Neuroergonomics”, In 11th Berlin Workshop of Human-Machine Systems, Proceedings 7th-9th October, 2015.
Zhang, M. and Winkler, H. (2018), Critical Success Factors for Implementing Digitalization in Logistics with a Focus on Intralogistics and Warehouse Management, Thesis, Faculty Wirtschaftsingenieurwesen, Esslingen University.
Received: 10 May 2019
Approved: 20 May 2019
DOI: 10.14488/BJOPM.2019.v16.n3.a15
How to cite: Winkler, H. and Zinsmeister, L. (2019), “Trends in digitalization of intralogistics and the critical success factors of its implementation”, Brazilian Journal of Operations & Production Management, Vol. 16, No. 3, pp. 537-549, available from: https://bjopm.emnuvens.com.br/bjopm/article/view/855 (access year month day).